Mass Optimized Climbing Robot
The Project:
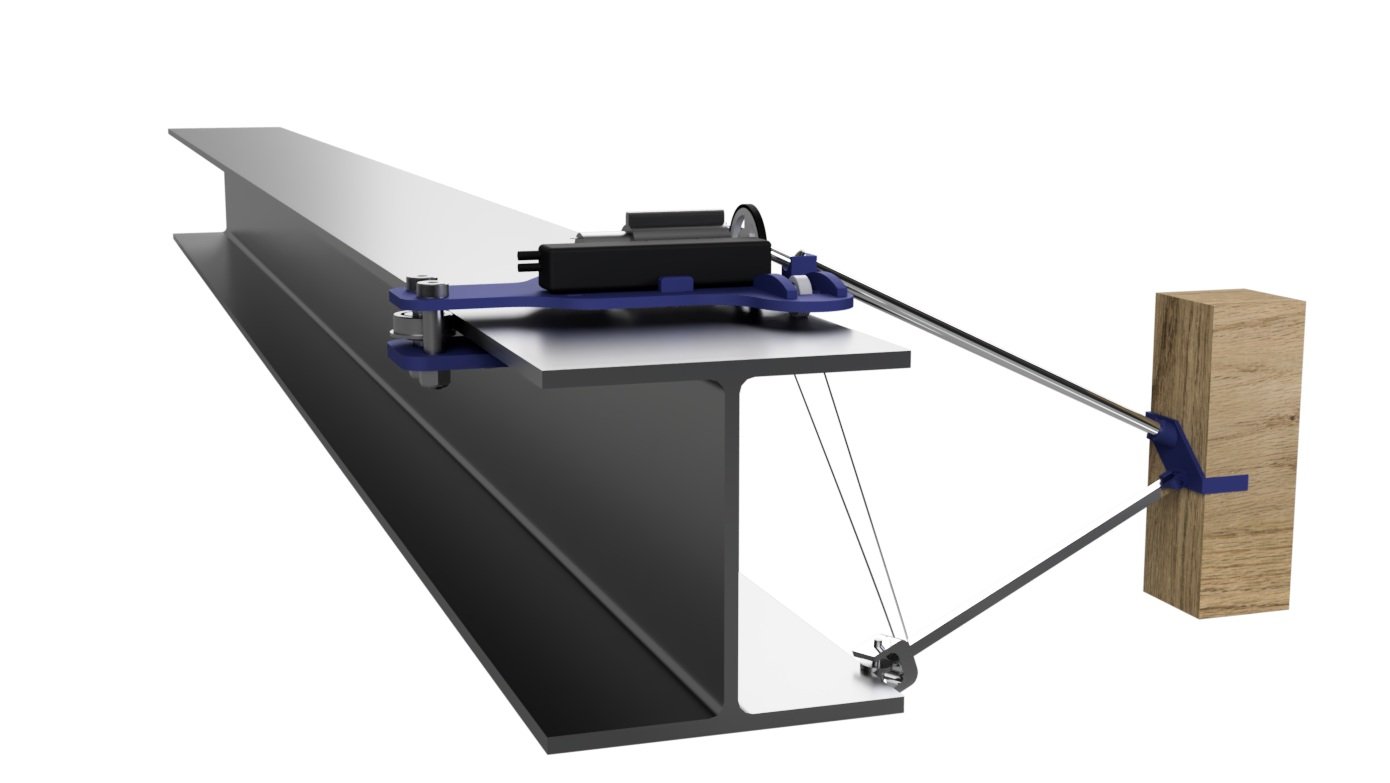
This robot was designed to scale an I-beam as fast as possible while carrying a payload a set distance away from the beam. Therefore, its chassis is mass-optimized in shape and material and its motor is operating at its highest efficiency given losses to an 80:1 gearbox and friction in the wheels. Out of 17 teams, this robot won the award for best “Geometric Excellence.”
Skills:
mass optimization
motor efficiency optimization
FEA analysis
CAD
Mechanical Analysis
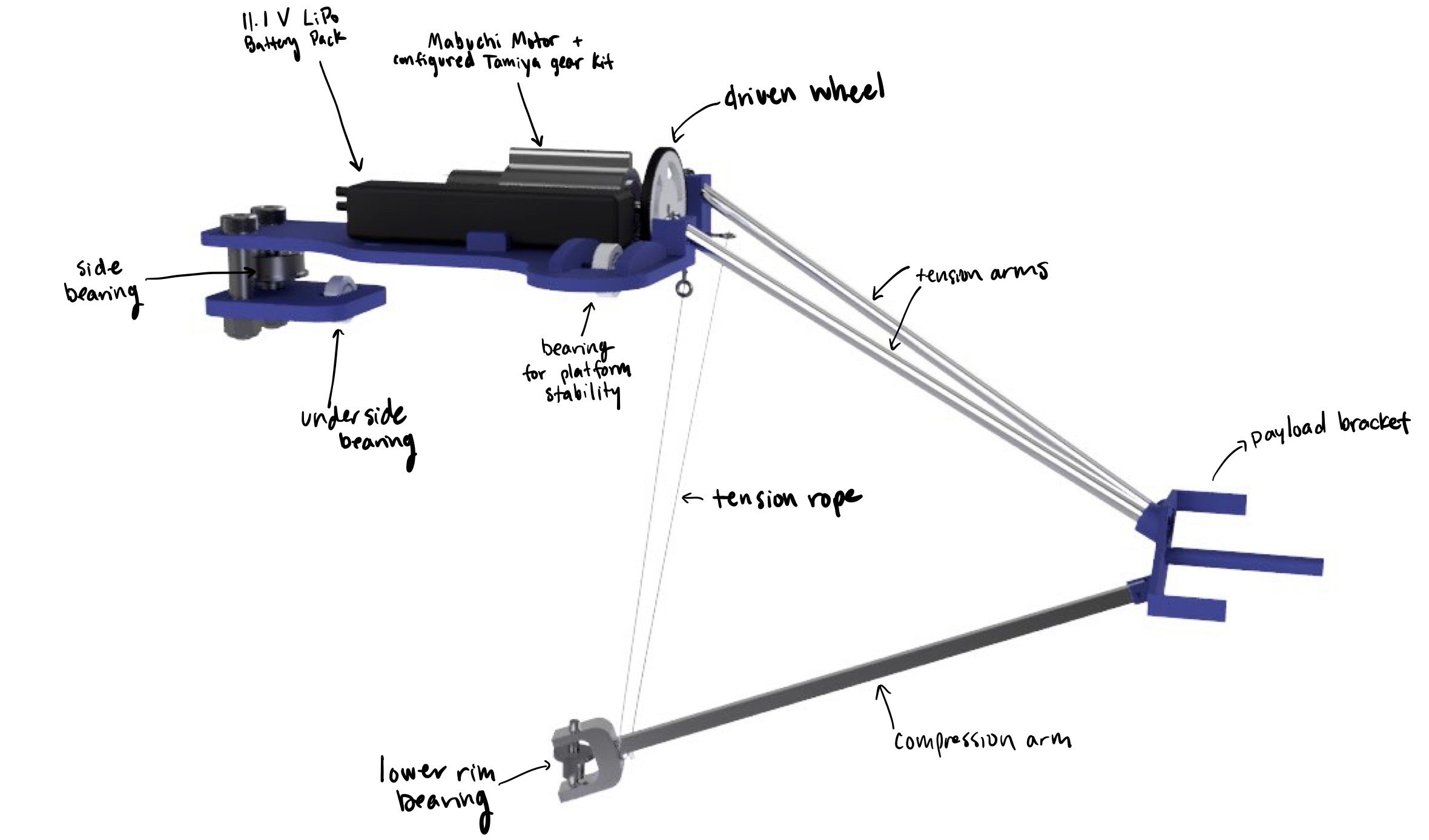
To optimize the robot's mass, we used two-force members to support the payload, reducing non-axial force and preventing buckling. One arm is fully in compression while the other was initially in full tension and later converted to two tension ropes providing lighter weight and increased stability during climbing. To prevent friction along the I-beam's bottom edge we added a bearing on the bottom rim.

Power Analysis
For power, we selected the FCONEGY 3S 11.1V LiPo Battery pack, which allowed us to achieve our desired voltage and current while adding a relatively low mass (0.23 lbs) to the robot. In steady state, this 11.1V battery has a current of 8.40A, resulting in a steady-state power output of 93.28 W. Given this power, and the expected losses from the motor, gearbox, and friction in the wheels, we set out to calculate the time it would take our robot to scale the I-beam.

We characterized our given motor to find constant values k (0.002) and friction torque (0.00060). We found a steady-state motor power output of 43.62 W, for a motor efficiency of 46.77%. To minimize climb time, we sought to maximize mechanical power while avoiding a current that would overheat the motor. We achieved this by operating our robot as close as possible to half the stall torque for 11.1V.

We calculated efficiency losses from the motor’s attached gearbox. and found that the 5:1 stage in the transmission has a 74.90% efficiency, and each of the two 4:1 stages has an 81.73% efficiency. At an 80:1 gear ratio, this yielded a total transmission efficiency of 50.02%.

The other source of mechanical losses for this robot is rolling resistance on all five wheels. The sum of energy losses from each yielded total mechanical losses from the wheels: 1.10 J.

We calculated climb time by dividing the total required energy (energy losses from wheels + potential energy associated with ascending the robot) by output shaft power. This yielded a climb time of 4.82 seconds.
Final Design
Award for Geometric Excellence
Due to our extraordinarily mass-optimized design, our team, out of seventeen, earned the Geometric Excellence award.
